


What I've Been Working On...
What I've Been Working On...
In this post I explain what I've done so far in creating my next project. (Update)

What I’m Building
Since my last project, I’ve been devising a way to create a better, more efficient, more diverse, more precise, and more practical robotic arm. I’ve come to call this new style of robotic arm “E.R.A.” abbreviated for Everything Robotic Arm. I’ve made some major changes from my last.
What’s Different?
In this robotic arm, I am using industrial gearboxes and timing belts rather than homemade ones. I’m doing this because they have no backlash or dead zone, meaning I can be precise up to 0.1 degrees when I call commands. The purpose of the timing belts is that they also have no dead zone between toothed connections. This means there will be no wiggle room between movements, creating smoother and more precise transitions between current and called positions.
Something else new is that I will be adding encoders into each axis of rotation, this is important because it will give me feedback on its position. Using this I will be able to extrapolate each axis by the angle in which it is rotated to pinpoint an exact point in space. Using this concept, I can integrate positioning commands to enable in more practical uses such as assembly, screwing, lift n’ place, etc. The end goal of this project is to create a somewhat industrial-grade robotic arm for under $300.

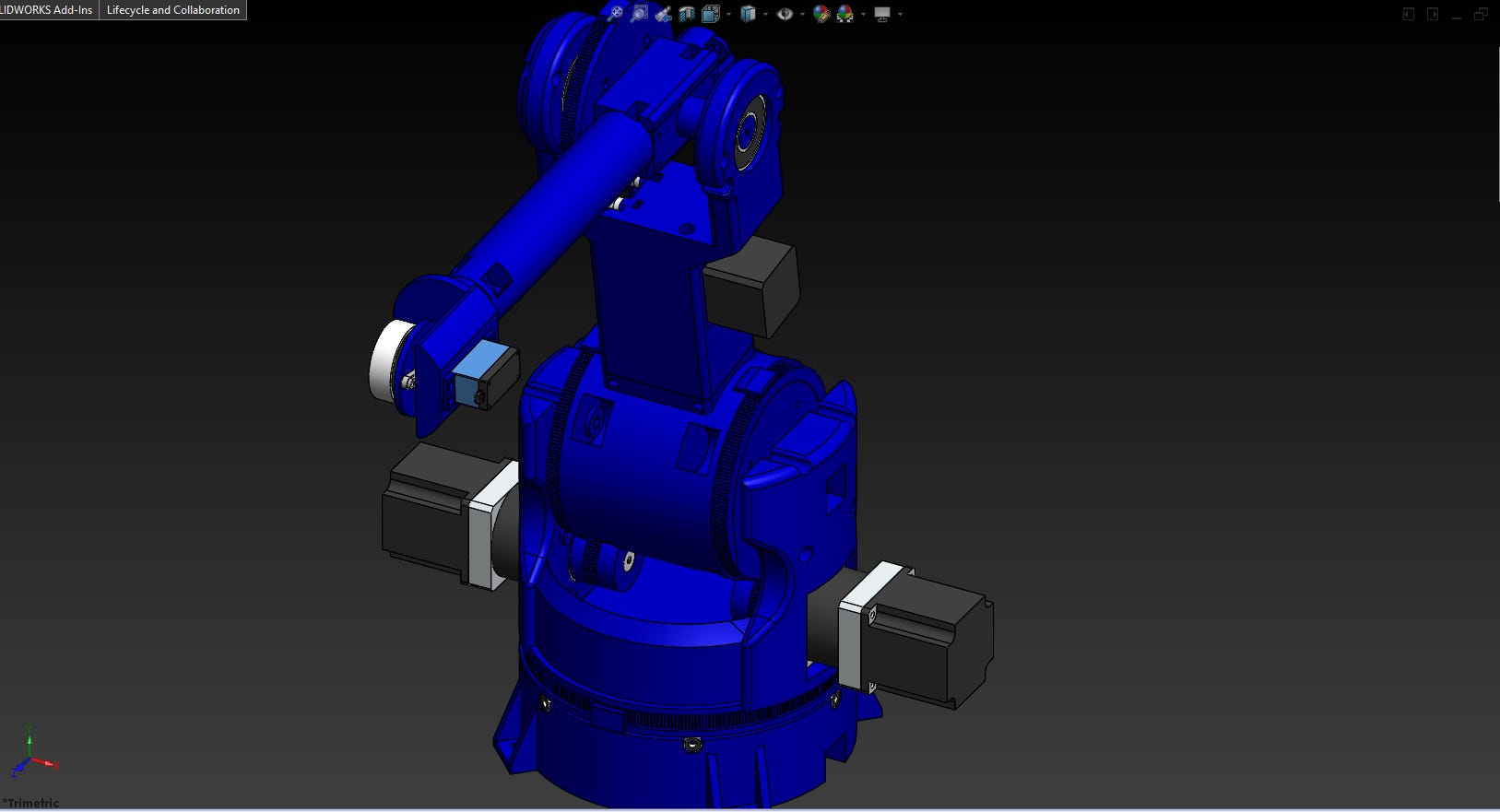
What Have I Done So Far?
So far, I have fully assembled and programmed the base of the arm and Joint 2 (J2). I’ve uploaded some videos below so you can see what it can do so far, although, of course, there will be updates to the code and plenty more added. This is just some of the base concepts in a preview.
What’s Next?
I will continue pursuing this project and will keep you updated as I go along. I will also be making all my content open source in the near future so you can have a more intuitive experience. I will keep this post short since I’ll be going deep into detail when I finish ERA with all the hardware, design, electronics, and programming. Until then, thank you for your patience.
